Слиједи завршни одломак из моје нове књиге, „Невјероватне приче из свемира: иза сцене, мисије које мијењају наш поглед на космос“. Књига је изнутра поглед на неколико тренутних НАСА-ових роботских мисија, а овај одломак је део 3 од 3 који је објављен овде у часопису Спаце Магазине, Поглавља 2, "Ровинг Марс витх Цуриосити." Први део можете прочитати овде, а други део овде. Књига је доступна у штампаном облику или е-књизи (запалити или ноок) Амазон и Барнес & Нобле.
Како возити Марс Ровер
Како знатижеља зна где и како се возити по површини Марса? Можете замислити инжењере у ЈПЛ помоћу џојстика, сличних онима које се користе за играчке на даљинско управљање или видео игре. Али за разлику од РЦ вожње или играња, возачи Марс ровера немају тренутне визуелне улазе или видео екран да виде куда ровер иде. И баш као и при слетању, увек постоји временско кашњење када се наредба шаље роверу и када је примљена на Марс.
„Не вози се у интерактивном смислу у реалном времену због временског одмака“, објаснио је Јохн Мицхаел Мороокиан, који води тим возача ровера.
Стварни назив Мароокиана и његовог тима су „Ровер планери“, што прецизно описује шта они раде. Уместо да "возе" ровере по себи; они унапред планирају руту, програмирају специјализовани софтвер и учитавају упутства у Цуриосити.
„Користимо слике снимљене ровером из његове околине,“ рекао је Мороокиан. „Имамо сет стерео слика са четири црно-беле навигацијске камере, заједно са сликама са Хазцамс (камере за избегавање опасности), подржане сликама у боји високе резолуције са МастЦам-а који нам дају детаље о природи терена напред и трагове о врстама стена и минерала на налазишту. Ово помаже идентификовању структура које научницима изгледају занимљиво. "
Користећи све доступне податке, они могу креирати тродимензионалну визуализацију терена са специјализованим софтвером названим Ровер секвенцијалним и визуализационим програмом (РСВП).
"Ово је у основи Марс симулатор и у панораму сцене ставили смо симулирану радозналост да бисмо визуализовали како ровер може да пређе на свом путу", објаснио је Мороокиан. „Можемо ставити и стерео наочаре, које нашим очима омогућавају да призор виде у три димензије, као да смо тамо са ровером.
У виртуалној стварности возачи ровера могу манипулирати сценом и ровером како би тестирали све могућности које су руте најбоље и које области треба избјегавати. Тамо могу направити све грешке (заглавити се у дини, преврнути ровер, срушити се на велику стијену, отјерати обор) и усавршити редослијед вожње док прави ровер остане сигуран на Марсу.
„Научници такође прегледавају слике ради карактеристика које су занимљиве и консултују се са Ровер планером како би вам помогли у дефинисању пута. Затим састављамо детаљне команде које су неопходне да би се тачка стазе дошла од тачке А до тачке Б на том путу ", рекао је Мороокиан. „„ Такође можемо да уградимо команде потребне за упућивање ровера да оствари контакт са локацију помоћу роботске руке. “

Дакле, сваке ноћи је роверу наређено да се искључи осам сати како би своје батерије напунио нуклеарним генератором. Али прво радозналост шаље податке на Земљу, укључујући слике терена и било које научне информације. На планети Ровер планери преузимају те податке, обављају своје планирање, довршавају програмирање софтвера и преносе информације на Марс. Тада се буди знатижеља, преузимају упутства и настављају да раде. И циклус се понавља.
Цуриосити такође има функцију АутоНав која омогућава роверу да пређе подручја која тим још није видео на сликама. Дакле, могло би се прећи преко брда и низ другу страну до неиспричане територије, АутоНав осети потенцијалне опасности.
"Не користимо га пречесто јер је рачунски скупо, што значи да треба много дуже да ровер ради у том режиму", рекао је Мороокиан. "Често сматрамо да је боља трговина само доћи сутрадан, погледати слике и возити се даље колико можемо видети."

Док ми је Мороокиан показао разне собе које користе тимови за планирање ровера у ЈПЛ-у, објаснио ми је како треба да раде у више различитих временских распона.
"Не само да имамо дневно планирање рута," рекао је, "већ и дугорочно стратешко планирање користећи орбиталне слике из ХиРИСЕ камере на Марс Рецоннаиссанце Орбитер и бирамо стазе на основу карактеристика виђених из орбите. Наш тим ради стратешки и тражи много месеци да дефинише најбоље стазе. “
Други поступак назван Супра-Тацтицал изгледа тек наредне седмице. Ово укључује научне планере који управљају и дорађују врсте активности које ће ровер радити у кратком року. Такође, пошто нико из тима више не живи на Марсовом времену, петком Ровер планери раде планове за неколико дана.
"Пошто не радимо викендом, планови за петак садрже више различитих активности", рекао је Мороокиан. „Два паралелна тима одлучују у које дане ровер ће возити и у које дане ће обављати друге активности, попут рада са роботском руком или другим инструментима.“
Подаци који долазе преко ровера током викенда, међутим, прате се, а ако постоји проблем, позива се тим да изврши детаљнију процену. Мороокиан је рекао да су морали ангажовати тим за хитни викенд неколико пута, али до сада није било озбиљних проблема. "Међутим, то нас држи на ножним прстима", рекао је.
Ровер садржи бројне реактивне сигурносне провјере количине укупног нагиба ровер палубе и зглоба сустава овјеса точкова, тако да ако ровер иде преко превеликог објекта, аутоматски ће се зауставити.
Радозналост није изграђена за брзину. Дизајниран је да дневно пређе до 200 метара метра, али ријетко се путује толико далеко у Солу. До почетка 2016. ровер је прошао укупно око 7,5 миља (12 км) кроз површину Марса.

Неколико је начина да се утврди колико је радозналост прешла, али најтачније мерење назива се "Визуелна одометрија". Радозналост има специјализоване рупе на точковима у облику Морсеових слова, чиме се пише "ЈПЛ" - кимање кући Роверових научних и инжењерских тимова - преко марсовског тла.
"Визуелна одометрија делује упоређујући најновији пар стерео слика сакупљених отприлике на сваком метру преко вожње", рекао је Мороокиан. „Појединачне карактеристике у сцени се подударају и прате како би се измерила како је камера (а тиме и ровер) преточила и ротирала у тродимензионалном простору између две слике и то нам у врло стварном смислу говори колико је Цуриосити отишао . "
Пажљивим прегледом ровер трачница може се открити врста вуче коју точкови имају и ако су клизали, на пример због високих нагиба или пешчане земље.
На жалост, Цуриосити сада има нове рупе на точковима који не треба да буду тамо.
Ровер Проблемс
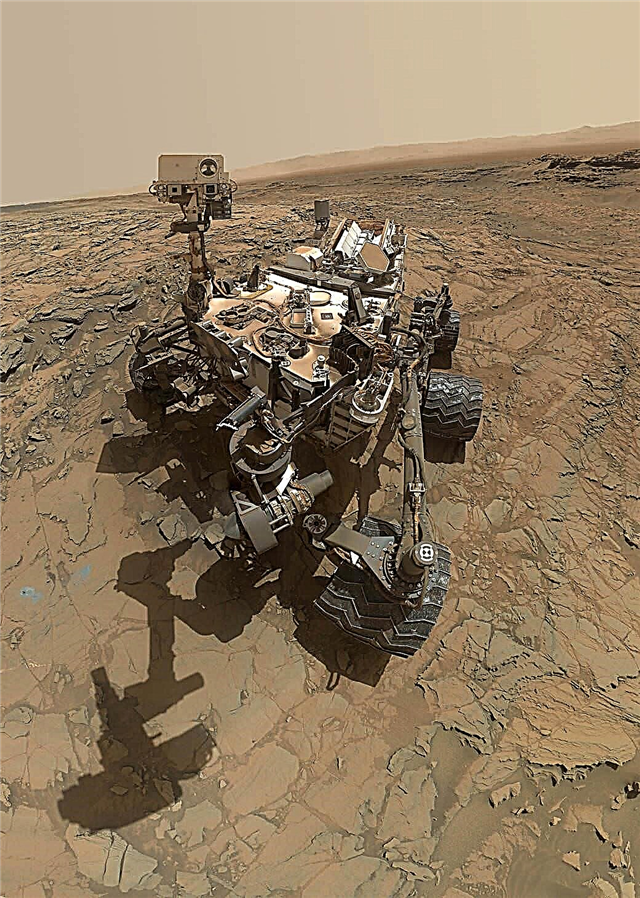
Мороокиан и научник пројеката Асхвин Васавада изразили су олакшање и задовољство што је све у свему - ово далеко до мисије - Радозналост прилично здрав возач. Цео научни терет тренутно ради са готово пуном способношћу. Али инжењерски тим пази на неколико питања.
"Око сол 400, схватили смо да се точкови троше брже него што смо очекивали", рекао је Васавада.

А трошење се није састојало од само малих рупа; тим је почео да види продоре и гадне сузе. Инжињери су схватили да су рупе створене од тврдих, назубљених стијена које је ровер за то време возио.
"Нисмо у потпуности очекивали врсту" шиљастих "стена које су направиле штету", рекао је Васавада. „Такође смо урадили нека испитивања и видели како један точак може гурнути други точак у стену, што је штете погоршало. Сада возимо пажљивије и не возимо толико дуго као раније. Успели смо да сравнимо штету са прихватљивијом стопом. “
Почетком мисије, Цуриосити-ин рачунар је прешао у „сигурни режим“ неколико пута, јер је софтвер Цуриосити препознао проблем, а одговор је био да онемогући даље активности и телефонски дом.
Специјализовани софтвер за заштиту од кварова покреће се кроз модуле и инструменте, а када се појави проблем, ровер се зауставља и на Земљу шаље податке назване 'евиденција догађаја'. Записи укључују разне категорије хитности, а почетком 2015. године ровер је послао поруку која је у суштини рекла: "Ово је врло, врло лоше." Вежба на руци ровера доживела је колебање електричне струје - попут кратког споја.
„Цуриоситиов софтвер има могућност откривања кратких трака, попут прекидача склопа уземљења који имате у свом купатилу“, објаснио је Мороокиан, „осим што вам овај говори„ ово је врло, јако лоше “, уместо да вам даје жуто светло.“
Пошто тим не може да оде на Марс и поправи проблем, све је поправљено било слањем ажурирања софтвера на ровер или променом оперативних процедура.

„Сада смо само пажљивији у начину на који користимо бушилицу“, рекао је Васавада, „и не бушимо с пуном снагом у почетку, већ полако подизајте се. То је некако као да сада возимо, опрезније, али посао и даље обавља. То до сада није било огромног утицаја. "
Лаганији додир бушилице био је неопходан и за мекше камене блатнике и пешчане камене на којима је налетио ровер. Мороокиан је рекао да постоји забринутост да слојевите стијене можда не остану под нападом стандардног протокола бушења, па су прилагодили технику тако да користе најнижа „подешавања“ која и даље омогућују бушилици да постигне довољан напредак у стијени.
Али могућности коришћења вежбе су све веће како радозналост почиње кретати планином. Ровер путује кроз оно што Васавада назива „циљано богатим, врло занимљивим подручјем“, док научни тим ради на повезивању геолошког контекста свега што виде на сликама.
Проналажење равнотеже на Марсу
Док је преусмеравање у заљеву Иелловкнифе омогућило тиму да направе нека велика открића, осећали су притисак да стигну до планине. Оштро, тако да смо се „возили као пакао током једне године“, рекао је Васавада.
На планини је још увек присутан максималан задатак како би се прошла кроз најмање четири различите стенске јединице - или слојеве - на планини. Оштар. Сваки слој могао би бити попут поглавља у Марсовој историји.

„Екплоринг Мт. Оштро је фасцинантно ", рекао је Васавада," и покушавамо да одржимо спој између заиста сјајних открића, која - како мрзиш да кажеш - успорава нас и постављамо све више на планину. Гледајући пажљиво стену испред себе значи да никада нећете моћи да пређете тамо и погледате ту другу занимљиву стену. "
Васавада и Мороокиан рекли су да је изазов сачувати равнотежу сваког дана - пронаћи оно што се назива „кољено у кривини“ или „слатко место“ савршене оптимизације између вожње и заустављања за науку.
Тада постоји равнотежа између заустављања да се врши комплетно проматрање са свим инструментима и извођења „летеће науке“ где се дају мање интензивна запажања.
„Ми примењујемо опажања која можемо и стварамо све хипотезе које можемо у реалном времену“, рекао је Васавада. „Чак и ако нам остане 100 отворених питања, знамо да можемо одговорити на питања све док знамо да смо узели довољно података.“
Куриозитет примарни циљ није врх, већ регија дугачка око 1330 стопа (400 метара) горе, где геолози очекују да нађу границу између стена на којима је било пуно воде у њиховој историји, и оних које нису. Та граница ће пружити увид у прелазак Марса са влажне планете на суву, попуњавајући кључни јаз у разумевању историје планете.

Нико заиста не зна колико ће трајати радозналост или ће изненадити све попут својих претходника Дух и прилика. Након што је прошла „главну мисију“ једне године на Марсу (две земаљске године), а сада у продуженој мисији, једна велика променљива је извор напајања РТГ-а. Док ће расположива снага почети непрестано опадати, и Васавада и Мороокиан не очекују да ће то бити у проблему најмање још четири земаљске године, и с правом "неговања", снага би могла трајати десетак година или више.
Али такође знају да не постоји начин да се предвиди колико дуго ће знатижеља проћи или који би неочекивани догађај могао окончати мисију.
Звер
Да ли Цуриосити има личност попут претходних Марс ровера?
"Заправо не, изгледа да антропоморфикујемо овај ровер као што су то чинили људи са Духом и Приликом", рекао је Васавада. „Нисмо се емоционално везали за то. Социолози то заправо проучавају. " Забацио је главу забављеним осмехом.
Васавада је наговестио да би то могло имати везе са величином Радозналости.
"Ја то сматрам џиновском звери", рекао је директно. „Али уопште не на средњи начин.“

Оно што је дошло да окарактерише ову мисију, рекао је Васавада, је сложеност исте, у свим димензијама: људска компонента наласка 500 људи да раде и сарађују истовремено оптимизујући свачије таленте; одржавање ровера сигурним и здравим; и држање десет инструмената сваки дан, који понекад раде потпуно неповезане научне задатке.
"Сваки дан је наших властитих" седам минута терора ", где толико ствари мора ићи свакога дана", рекао је Васавада. „Постоји милион потенцијалних проблема и интеракција, и стално морате размишљати о свим начинима на које ствари могу поћи по злу, јер постоји милион начина на које можете упропастити. То је запетљан плес, али срећом имамо сјајан тим. "
Затим је уз осмех додао: „Ова мисија је узбудљива иако је звер“.
„Невероватне приче из свемира: поглед иза сцене да мисије мењају наш поглед на космос“ објављује Паге Стреет Публисхинг, подружница компаније Мацмиллан.