Ако сте погледали ХиРИСЕ слике високе резолуције са Марс Рецоннаиссанце Орбитер-а или сте имали прилику да истражите нови Гоогле Марс, знате да је Марс препун кратера, планина, јарка и свих врста занимљивог - и опасног - терена . Подручја попут ових са слојевитим наслагама, седиментима, ломљењем и ломљењем су само врста места за потрагу за изворима метана који се производи на Марсу. Али много је превише ризично послати наш тренутни стил ровера, укључујући и научну лабораторију Марс-а (МСЛ) из 2011., на издајнички терен. Али, инжењери из ЈПЛ-а, заједно са студентима Калифорнијског технолошког института, дизајнирали су и тестирали свестраног робота мале масе који се може додати већим роверима попут МСЛ-а који могу брзати са литица, кретати се по стрмим и каменитим теренима и истраживати дубоки кратери.
Овај прототип ровер, назван Акел, могао би помоћи будућим роботским свемирским бродовима да боље истраже и истраже стране светове, попут Марса. На Земљи би Акел могао да помогне у операцијама потраге и спашавања.
„Акел проширује нашу способност да истражујемо терене које нисмо били у стању да истражимо у прошлости, попут дубоких кратера са вертикално нагнутим подножјима“, рекао је главни истраживач Акела, Исса А. Д. Неснас, одељење за роботику и мобилност ЈПЛ-а. „Такође, с обзиром да је Акел релативно мале масе, мисија може да преброји бројне Акел ровере. То би нам пружило прилику да будемо агресивнији према терену који ћемо истражити, а истовремено одржавамо укупан ризик. “
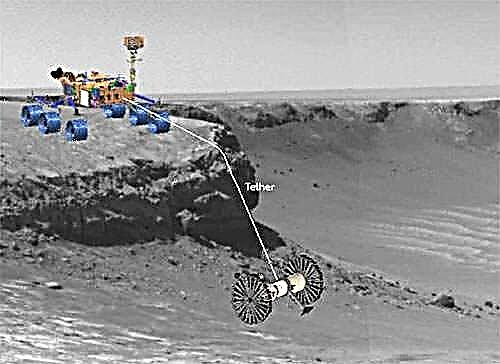
Неснас је рекао да је Акел попут ио-ио - налази се на привезу причвршћеном на већем роверу и може ићи горе-доле по кратерима, кањонима и јарцима, истражујући подручја која нису сигурна за остале ровере.

Једноставан и елегантан дизајн Аксела, који може радити и наопако и са десне стране нагоре, користи само три мотора: један за управљање сва своја два точка, а трећи за управљање полугом. Ручица садржи мерицу за прикупљање месечевог или планетарног материјала за научнике која проучава, а такође прилагођава и две стерео камере робота, које се могу нагињати за 360 степени.

Акелово цилиндрично тело има могућности рачунара и бежичне комуникације и инерцијални сензор за аутономно функционисање. Такође поседује привез који Акел може да се спусти са веће тачке слетача, ровера или сидришта. Ровер може да користи различите типове точкова, од великих склопивих точкова до надувавања, који помажу роверу да поднесе тешко слетање и руковање каменитим тереном.
Акел је у развоју од 1999. године, а студенти са Цалтецх-а, Пурдуе универзитета и Аркансас Тецх Универзитета сарађивали су с ЈПЛ-ом током година како би развили овај свестрани ровер.
Више информација о Акелу потражите на страници Акел компаније ЈПЛ и на веб локацији Акел оф Цалтецх.